
Veíamos en el anterior artículo lo novedoso del concepto de la navegación basada en prestaciones, o PBN, en cuanto al giro de 180º que supone en la concepción y adopción de las nuevas aplicaciones de navegación de área, equipos embarcados, formación de tripulaciones y personal de control, obtención de las aprobaciones operacionales y, sobre todo, el objetivo de tratar de tener un entendimiento homogéneo y armonizado a nivel global. Y, como soporte fundamental de la PBN, esbozábamos los fundamentos de lo que son las ayudas a la navegación basadas en las diferentes constelaciones de satélites.
No está de más volver a decir que la PBN abandona la navegación convencional y sólo considera la navegación de área, la RNAV, en las especificaciones que establece. Es decir, recurriendo a la definición académica, la PBN se basa en aquella navegación que permite el vuelo de la ruta deseada dentro de la cobertura de las estaciones o sistemas que provean la señal adecuada para la especificación y cumpliendo las exigencias de cada espacio aéreo. Esas ayudas a la navegación pueden ser basadas en tierra (VOR y DME) o en el espacio (GNSS) o en sistemas autónomos, o una combinación de ellas, cada especificación PBN detalla las que admite para poder ser volada por cada aeronave en función de su equipamiento y aprobaciones operacionales.

Pero, ¿qué son las especificaciones de navegación PBN, ya mencionadas?
Las especificaciones para la navegación expresan en detalle las prestaciones (performance) requeridas del sistema embarcado en cuanto a precisión, integridad y continuidad; las funciones de navegación que el sistema de a bordo debe tener; el mínimo de sensores de navegación que deben estar integrados en el sistema de aviónica; y los requisitos impuestos a la tripulación de vuelo.
Las especificaciones para la navegación son la base para la elaboración del material para la certificación de aeronavegabilidad y la aprobación operacional. Es el Manual de la PBN de la OACI (Doc. 9613), en su volumen II, el documento que recoge detalladamente todas estas especificaciones.
A partir de estas premisas, se dividen en dos grandes grupos de especificaciones: las RNAV, no confundir con el propio concepto de navegación de área, y las RNP. La diferencia primordial es que una especificación RNP incluye el requisito de vigilancia y alerta de las prestaciones de a bordo, mientras que una especificación RNAV no incluye este requisito.
En lenguaje plano y a grandes rasgos, las RNAV son las que responden a los desarrollos y sistemas embarcados que existían antes de la aparición del concepto PBN de la OACI. Y las especificaciones RNP, y en consonancia las aviónicas RNP, son las aplicaciones y sistemas que han nacido ya con el concepto PBN definido. Aunque alguna es previa a la PBN.
Las especificaciones (y aviónicas) más novedosas, las RNP, en su concepción se han enfocado hacia una navegación más autónoma, que permita incluso implantaciones en escenarios con escasos o nulos servicios de vigilancia y/o comunicaciones limitadas, aprovechando al máximo posible el espacio aéreo disponible y aumentando la seguridad de las operaciones.

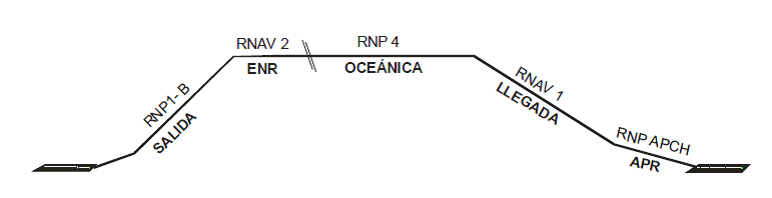
Dentro de cada una de estas dos grandes divisiones RNAV y RNP, la OACI clasifica las especificaciones de navegación según su área de aplicación más adecuada, esto es, rutas oceánicas o áreas remotas, rutas continentales, procedimientos para áreas terminales y maniobras de aproximación.
Las especificaciones, ya sean RNAV o RNP, llevan asociado un número que indica la precisión en la navegación lateral que se exige en ese espacio aéreo. El número no aparece en algunas aplicaciones RNP ya que estas abarcan diferentes fases de vuelo y, por tanto, contemplan diferentes valores de precisión lateral en cada una de ellas.
A buen seguro, la mayoría de los desarrollos RNAV y algunos RNP son bien conocidos por los lectores.

Pasemos a esbozar cada una de estas especificaciones de navegación y a indicar sus aplicaciones, tanto actuales como previstas de futuro. Comenzaremos por las RNAV.
La RNAV 10 fue concebida para áreas oceánicas y remotas, y es en realidad la hasta ahora conocida como RNP 10 que, por ejemplo, aplica en el corredor EUR-SAM. Dado que su nombre se encuentra ya profundamente acuñado y dado que es algo a extinguir, la OACI ha indicado que se puede seguir llamando indistintamente RNAV 10 o RNP 10, por lo que las cartas de radionavegación que contemplen estas rutas a buen seguro seguirán nombrándolas como RNP 10, al igual que la indicación a bordo del RNP en esas rutas.
La RNAV 10 está empezando ya a ser sustituida o, al menos considerada, en varias regiones por la RNP 4, que más adelante veremos.

La RNAV 5 es la anteriormente conocida como RNP 5 en Oriente Medio o RNAV básica o B-RNAV en Europa, donde está aplicada principalmente a ruta, aunque aún queda algún remanente de maniobras SID y STAR en algunos TMA. La especificación B-RNAV es equivalente automáticamente a la RNAV 5.
Actualmente todo el espacio aéreo europeo de ruta se considera que es B-RNAV, es decir, RNAV 5, aunque esas rutas sigan yendo de estación en estación. Es más, desde sus implantaciones iniciales allá por 1998, todos los países del área ECAC definieron todas sus rutas ATS, las existentes y las nuevas, con exigencia de RNAV 5 desde FL150 o superior. Otros desde FL95. Desde el 28 de octubre de 2014, para las operaciones en el espacio aéreo designado RNAV 5 (o B-RNAV) no se requiere una aprobación específica en Europa[1].
Es más que previsible que en Europa la RNAV 5 sea sustituida por la RNP 2 u otra aplicación de tipo RNP a medio plazo.
La RNAV 1 yla RNAV 2 son tratadas en la práctica por la OACI como una única especificación que agrupa a la ya antigua P-RNAV europea, principalmente empleada en procedimientos SID y STAR, y a la US RNAV, que los EE.UU. han aplicado en zonas limitadas de su espacio aéreo de ruta y TMA.
La RNAV 1, ya se está empleando ampliamente en Europa en procedimientos dentro de TMA, para salidas y llegadas primordialmente, y en un entorno radar, que es con la finalidad que se creó. No se espera que haya más implantaciones de la RNAV 2, per se, y que las existentes en Norteamérica vayan siendo sustituidas con el tiempo.
Igualmente los planes iniciales de Europa (Eurocontrol) han venido siendo que la RNAV 1 también vaya sustituyendo a la RNAV 5 en ruta, por cuestiones de un uso más eficiente del espacio aéreo, pero ahora mismo ya no es así, ya que comienza a pensarse en otras especificaciones más avanzadas, tipo RNP, como ya hemos mencionado. De hecho ya existe una propuesta de regulación europea[2] que aboga por implantar la RNP 1 en los TMA más congestionados de Europa y la RNP 2 para ruta.
Hay que decir que la diferencia entre la RNAV 1 de la PBN y las dos anteriores, la P-RNAV y la US RNAV, son mínimas, aunque las aprobaciones operacionales actuales basadas en la JAA TGL 10 o en la FAA AC 90-100[3] deben ser cotejadas en cuanto a requisitos de aeronavegabilidad por la autoridad aeronáutica de cada Estado antes de expedir la nueva aprobación RNAV 1 de la PBN.


Abajo: : carta SID Lanzarote RNAV 1
(Fuente: AIP España)
En general, como ya hemos venido indicando, con la renovación de las aviónicas, las aplicaciones RNAV con el tiempo están siendo sustituidas por las RNP, que añaden un plus de seguridad operacional, a la vez que otras potenciales ventajas no menos importantes como un menor impacto medioambiental o el facilitar un tránsito aéreo más fluido.
Pasando pues a las especificaciones RNP, recordemos que son todas las que contemplan la supervisión del seguimiento de la trayectoria y la alerta en caso de superar los niveles de aviso de cada especificación. Por ello, inicialmente, están ideadas para escenarios con escasa densidad de radioayudas terrestres o con servicios ATS limitados, como puede ser el control radar. Pero lo cierto es que, gracias a las exigencias superiores con respecto a las especificaciones RNAV, comienzan a ser consideradas también para maximizar el uso de ciertos espacios aéreos “bien servidos”, ya que proveen de un extra en la garantía de la seguridad operacional al supervisar y avisar a bordo acerca del seguimiento de las trayectorias, como hemos dicho, permitiendo aprovechar mejor los volúmenes de espacio aéreo congestionados.
Así, la RNP 4 va a comenzar a ser empleada de manera cada vez más extendida en las rutas oceánicas o áreas remotas con el fin de mejorar el uso del espacio aéreo, reduciendo las separaciones laterales y longitudinales. De hecho, por poner algún ejemplo, se prevé que sustituya gradualmente a las MNSP, ancestro de la PBN, en el área oceánica del Atlántico norte (NAT)[4] a corto plazo y en el corredor EUR/SAM está empezando a ser tenida en cuenta como una opción de mejora para sustituir a las rutas basadas en la RNAV 10 (RNP 10).
La RNP 2 está enfocada a ser usada con preferencia en rutas continentales con escasa o nula cobertura de ayudas terrestres o servicios ATS y en los que el tráfico sea menor. A nivel de Europa parece ser que podría ser el estándar que sustituyese a la RNAV 5, por las razones que ya hemos indicado antes de mejor aprovechamiento del espacio disponible, por la menor separación necesaria entre rutas paralelas, y por el plus de seguridad que representa la RNP. Cabe mencionar que las aviónicas capaces de esta especificación pueden incorporar una funcionalidad para ejecutar virajes de radio fijo en ruta (RFT), principal razón por la que las rutas RNP 2 pueden reducir su separación lateral con respecto a las estructuras de ruta actuales. También incorporan normalmente la capacidad de hacer “lateral offset” escalable, al igual que para otras especificaciones.
Por su parte, la RNP 1, aunque concebida inicialmente para espacio aéreo terminal sin vigilancia ATS o con vigilancia limitada, está destinada a convertirse con el tiempo también en un estándar para las SID y STAR en TMAs “bien equipados” con alta densidad de tráfico desplazando a la RNAV 1. De hecho, como ya hemos apuntado con anterioridad, la Comisión Europea va a hacer que el uso de la RNP 1 sea obligatorio a partir del 2024 en las SID y STAR de los principales TMAs, los más congestionados, del viejo continente[5]. Y sea la opción preferente para el resto de TMAs.
De forma similar a la RNP 2, las aviónicas RNP 1 pueden contemplar la funcionalidad de ejecución de virajes de radio fijo, en este caso denominados RF, radius to fix. Esto permite una alta capacidad de repetición de los virajes en TMA, es decir, una concentración de las trayectorias de viraje mucho mayor a la que hoy día permiten los waypoint fly-by o fly-over, lo que redunda en menores afectaciones medioambientales, un potencial ahorro de combustible y mayor facilidad para gestionar las separaciones entre tráficos por parte del ATC.
Vamos a hacer aquí un alto en la introducción de las especificaciones de navegación. Bosquejadas todas las especificaciones de ruta y de TMA, es momento de hacer dos puntualizaciones importantes.
La primera es que, aunque la aviónica y/o aprobación operacional sea RNP no garantiza el cumplir, en principio, con lo requerido para una especificación RNAV (e.g. RNP 1 frente a RNAV 1). De igual manera, inicialmente el que el equipamiento de navegación sea capaz de alcanzar un valor de precisión lateral pequeño, tampoco permite tener inmediatamente la capacidad de cumplir con lo exigido en una ruta con un valor superior, por ejemplo RNP 1 frente a RNP 4. Todo ello debe pasar una inspección por la autoridad aeronáutica correspondiente, ya que las exigencias de equipamiento, de formación o de procedimientos de contingencia pueden variar de unas especificaciones a otras.
Teniendo en cuenta estas precisiones que acabamos de apuntar, junto con las especificaciones que hasta ahora hemos ido citando, abren la posibilidad a que un vuelo que tenga que pasar por diferentes espacios aéreos pueda llegar a requerir un abanico amplio de aprobaciones operacionales. Y eso sin citar que tal vez deba necesitar una aviónica y mantenimiento muy variado y costoso o una formación de tripulaciones extensa. Algo que parece ir en contra precisamente de la propia filosofía de la PBN.
Por estas razones, Eurocontrol comenzó a idear hace unos años algo que lo simplificase todo. Que simplificase y abaratase la obtención de la aprobación operacional para los operadores y facilitase la implantación en los espacios aéreos para los proveedores de servicios de navegación aérea.
El resultado fue una especificación de navegación que agrupa bajo una sola a varias de las existentes, las más adecuadas de acuerdo a su aplicación futura y su uso presente y que abarcan todas las fases de vuelo: oceánica, ruta, área terminal y aproximación.
Con estas premisas se concibió la RNP Avanzada o A-RNP. Inmediatamente la OACI la adoptó e incorporó a la PBN. La A-RNP ha sido la primera especificación de navegación que ha nacido en el seno del concepto PBN con el mismo propósito inicial de la PBN, racionalizar y armonizar. Evidentemente, no será la solución óptima aplicable a todos los escenarios, pero sí a la mayoría.
Así, la especificación A-RNP agrupa a las RNAV 5, RNAV 2, RNAV 1, RNP 2 y RNP 1, ya mencionadas, y a la RNP APCH, que más adelante veremos. Pero, además, define también las funcionalidades adicionales que pueden emplearse, como por ejemplo los virajes de radio fijo, tanto el RF para TMA (siempre que no sea en el tramo final de aproximación) como el FRT para ruta, la escalabilidad de la RNP en función de la fase de vuelo, la navegación vertical barométrica, etc.
La razón por la que la A-RNP comprende especificaciones RNAV y, además, unas cuantas sean elegibles para ser implantadas en procedimientos de TMA se debe a que se ha pretendido que sea flexible en su uso y que así pueda ser aplicada lo antes posible a diversos escenarios acogiendo a aeronaves equipadas con aviónicas no tan modernas junto a las más avanzadas, facilitando la gestión del tránsito.
La consecuencia inmediata de la A-RNP es que permite que todas las partes interesadas se beneficien. La industria cuenta, desde ya, con un estándar común y bien definido para desarrollar aviónicas mucho más racionales y seguramente más económicas. Los ANSPs pueden homogeneizar la definición de sus espacios aéreos y planificar su desarrollo en consecuencia a la vez que hacen más sencilla la formación de los ATC. Las autoridades aeronáuticas cuentan con unos criterios comunes y agrupados para facilitar su labor de comprobación de los requisitos de aeronavegabilidad. Y, finalmente, los operadores aéreos pueden reducir costes y simplificar significativamente tanto el proceso administrativo de obtención de la aprobación operacional, como la formación de pilotos y las inversiones en aviónicas futuras y mantenimiento. También permite que haya un escenario futuro más fácilmente interoperable a nivel global y, sobre todo, racionaliza los sistemas y procedimientos operacionales para las tripulaciones.
Como hemos visto, a pesar de que las aplicaciones RNAV no se han desplegado tan ampliamente como era de esperar, ni siquiera en algunos escenarios en los que se hubieran solucionado problemas que las maniobras convencionales no podían resolver, las aplicaciones RNP son las que están comenzando a implantarse o están consolidadas ya en los planes de implantación venideros. Y es que suponen un refuerzo muy importante de la seguridad operacional y de la conciencia situacional y, además, permiten diseñar maniobras con menor impacto acústico sobre poblaciones y trayectorias más eficientes que faciliten el ahorro de combustible y, por tanto, la reducción de emisiones contaminantes.
En el próximo artículo sobre la PBN nos centraremos en las especificaciones RNP, y también aplicaciones GBAS, creadas para las maniobras de aproximación, muchas ya ampliamente implantadas en todo el Mundo. Trataremos de presentar una visión práctica, poco académica, ya que es un área que cuenta con muy diversas aplicaciones donde las muy variadas aviónicas, aprobaciones operacionales, formación de pilotos y fichas de vuelo juegan un papel aún mucho más significativo que en las especificaciones en este artículo presentadas.
NOTAS AL PIE:
[1] Reglamento (UE) No 965/2012 de la Comisión, de 5 de octubre de 2012, por el que se establecen requisitos técnicos y procedimientos administrativos en relación con las operaciones aéreas en virtud del Reglamento (CE) no 216/2008 del Parlamento Europeo y del Consejo. Anexo V.
[2] EASA NPA 2015-01.
[3] La posesión de ambas aprobaciones operacionales, la estadounidense y la europea, sí proporciona automáticamente la disposición para obtener la aprobación RNAV 1 sin restricciones.
[4] Estas implantaciones adicionales está previsto que sean graduales a partir de 2015 e irán acompañadas de medidas como la adopción del CPDLC (Data Link) y el ADS-C, entre otras.
[5] REGLAMENTO DE EJECUCIÓN (UE) Nº 716/2014 DE LA COMISIÓN de 27 de junio de 2014 relativo al establecimiento del proyecto piloto común destinado a respaldar la ejecución del Plan Maestro de Gestión del Tránsito Aéreo europeo.




Gracias Rafael por hacer comprensible estos conceptos que evolucionan tan rápidamente.
Un saludo
Estimado Juan Ignacio, te agradezco enormemente tu comentario. Gracias a este estupendo medio comunicación de nuestro mundo de la aviación que es Hispaviación 2.0, se puede colaborar en la divulgación de todos estos asuntos que están en rápida y constante evolución y que, en mi opinión, requieren de la participación y debate de los diferentes profesionales involucrados: pilotos, controladores, gestores, ingenieros, etc. Creo que de ese intercambio de visiones y opiniones es más fácil divulgar y entender por todos los actores estos nuevos y evolutivos conceptos.
Un afectuoso saludo.